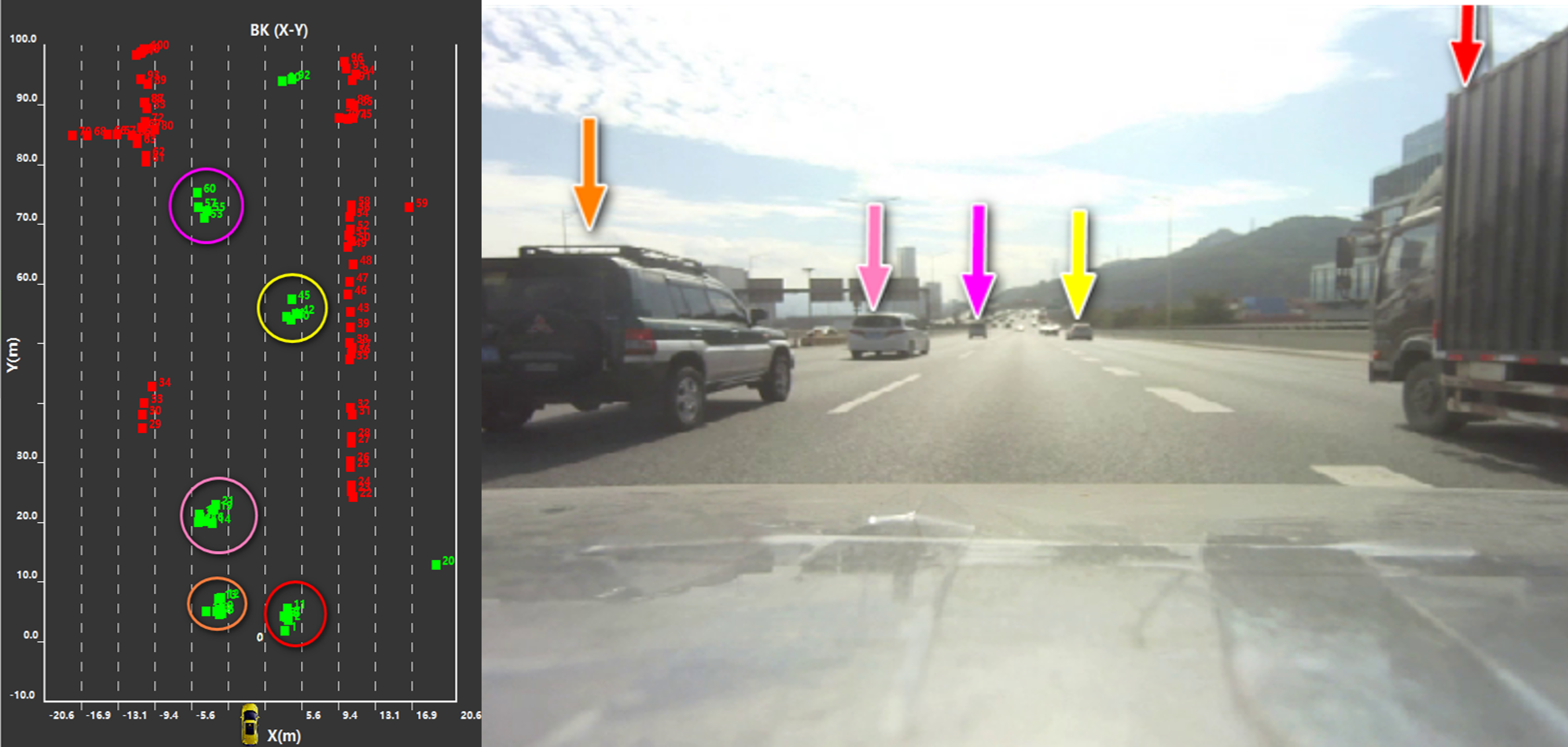
加特兰基于Alps-Pro毫米波雷达SoC芯片开发的前雷达方案,具备卓越的检测性能,完美满足L2/L2+智能辅助驾驶前雷达应用的高标准,可实现自适应巡航控制(ACC)、前向碰撞预警(FCW)等功能。Alps-Pro前雷达方案提供长距模式(LRR)与中距模式(MRR),具有更强大的距离探测、实时测速、二维测角、角度分辨、目标刻画等能力,帮助汽车“看”得更远、更精准,赋能汽车主动安全。
实现自适应巡航控制、前向碰撞预警等智能辅助驾驶功能
Alps平台
Andes平台
Kunlun平台
Dubhe平台
Dubhe平台

前雷达
实现自适应巡航控制、前向碰撞预警等智能辅助驾驶功能
加特兰基于Alps-Pro毫米波雷达SoC芯片开发的前雷达方案,具备卓越的检测性能,完美满足L2/L2+智能辅助驾驶前雷达应用的高标准,可实现自适应巡航控制(ACC)、前向碰撞预警(FCW)等功能。Alps-Pro前雷达方案提供长距模式(LRR)与中距模式(MRR),具有更强大的距离探测、实时测速、二维测角、角度分辨、目标刻画等能力,帮助汽车“看”得更远、更精准,赋能汽车主动安全。

加特兰Alps-Pro CAL77S344-AE高性能前雷达方案指标
| 指标/模式 | 长距模式(LRR) | 中距模式(MRR) |
|---|---|---|
| 最大距离 | 240 m @ 0° 240 m @ ±10° FOV 100 m @ ±45° FOV 80 m @ ±60° FOV |
100 m @ 0° 100 m @ ±10° FOV 100 m @ ±45° FOV 80 m @ ±60° FOV |
| 距离分辨率 | 0.5 m | 0.2 m |
| 距离精度 | ±0.1 m | ±0.04 m |
| 速度范围 | -85–85 m/s | -85–85 m/s |
| 速度分辨率 | 0.15 m/s | 0.12 m/s |
| 速度精度 | ±0.03 m/s | ±0.03 m/s |
| 水平角 FOV | -60°–60° | -60°–60° |
| 水平角分辨率 | 2.8° | 2.8° |
| 水平角精度 | +0.1° @ ±10° FOV ±0.2° @ ±45° FOV +0.5° @ ±60° FOV |
+0.1° @ ±10° FOV ±0.2° @ ±45° FOV ±0.5° @ ±60° FOV |
| 俯仰角 FOV | -10°–10° | -10°–10° |
| 俯仰角精度 | ±0.5° @ ±10° FOV | ±0.5° @ ±10° FOV |
| 最大目标数(原始点) | 512 | 512 |
| 刷新周期 | 50 ms | 50 ms |
*加特兰Alps-Pro系列SoC产品还提供CAL77S344-AR芯片,采用RoP®(Radiator on Package)封装,配合波导天线,可帮助汽车前雷达实现更远的探测距离、更宽的FOV、更强的角度分辨。
性能亮点
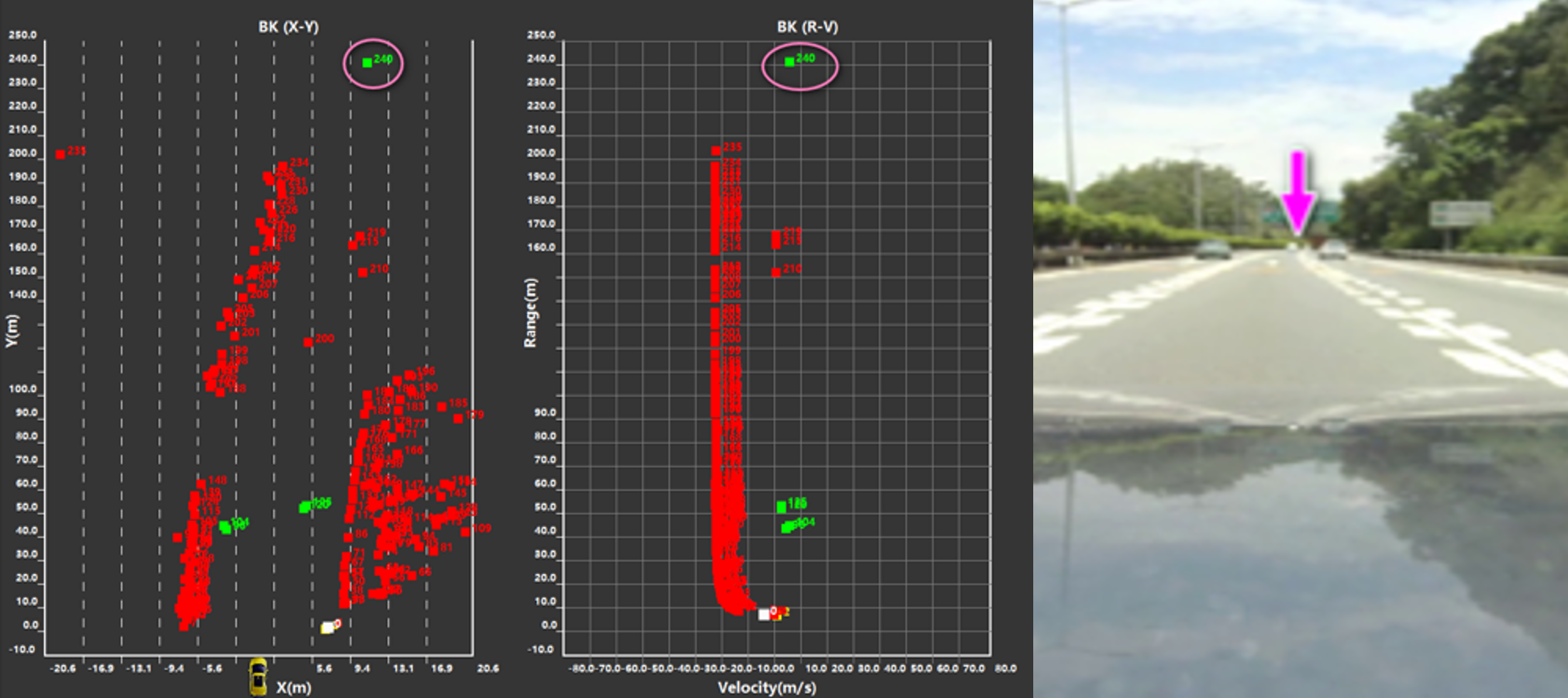
更强大的距离探测
长距模式下,Alps-Pro单芯片功耗仅2W左右便可实现最远240 m的探测距离,并且保证了超高的距离分辨率(0.5 m)与距离精度(±0.1 m)。
更精准的实时测速
Alps-Pro前雷达方案可实现-85 m/s–85 m/s范围内的精准测速,速度分辨率高达0.12 m/s(中距)与0.15 m/s(长距),速度精度达到±0.03 m/s。

测角范围大、精度高
在水平角-60°–60°、俯仰角-10°–10°的FOV范围内,Alps-Pro前雷达在水平方向的测角精度达到±0.1°(@ ±10° FOV),俯仰方向测角精度达到±0.5°(@ ±10° FOV),可实现更精确的二维测角功能。

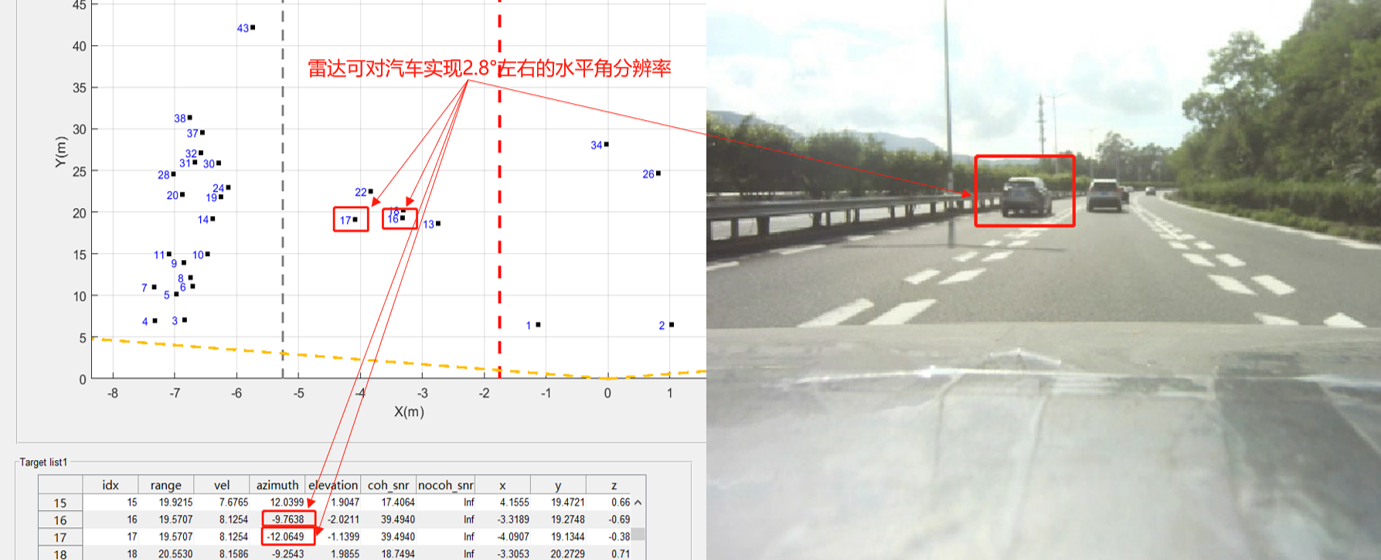
更稳定、准确的角度分辨
水平方向上角度分辨能力优异(2.8°),在角分辨稳定性上也有更出色的表现。
更精确的目标刻画能力
Alps-Pro前雷达方案可输出高密度的丰富点云数据,实现对车辆目标的精确刻画。
应用方案演示视频


应用芯片
合作伙伴

深圳慧联达科技有限公司
慧联达科技是领先的塑料金属化应用方案提供商,为客户提供5G、6G、毫米波、卫星通信核心射频部件的塑料金属化应用解决方案。公司以塑料金属化技术为核心,可为客户4D毫米波汽车雷达天线提供金属精密机加工、塑料精密机加工、PVD磁控溅射、电/化镀以及精密模具设计与加工、精密注塑等加工服务。

上海威浪达科技有限公司
上海威浪达科技成立于2023年,专注毫米波雷达3D波导天线的研发与制造,产品应用于智能驾驶及交通雷达领域。威浪达与加特兰基于Alps-Pro芯片合作开发双层天线演示板,通过优化波导天线与芯片集成设计,显著提升毫米波雷达信号稳定性与探测精度,并成功应用于ADAS前雷达及4D成像雷达。
Gapwaves
Gapwaves创建于2011年,具有提供毫米波天线设计、验证和生产的端到端能力。Gapwaves通过独有的间隙波导技术设计天线,在得到实验室环境验证以后,提供可工业化量产的高品质波导天线。目前Gapwaves能够提供基于注塑工艺和全金属工艺的两款波导天线产品。
Elektrobit
Elektrobit 致力于为汽车行业提供嵌入式互联软件产品和服务,为超过 6 亿辆汽车的逾 50 亿台设备提供支持,并针对汽车基础软件、互联和安全、自动驾驶和相关工具,以及用户体验提供灵活、创新的解决方案。Elektrobit与加特兰联合推出深度适配的EB tresos Classic AUTOSAR预集成方案,为开发者提供开箱即用的芯片级支持,客户可直接基于已验证代码库聚焦雷达算法开发,节省70%底层工作量,助力车企加速毫米波雷达系统量产落地。

普华基础软件股份有限公司
普华基础软件是全球首家将汽车操作系统开源的中国企业。公司致力于为中国整车企业和零部件供应商提供车用软件的设计、开发、配置、集成、测试全生命周期工具链、本地化一站式服务及车用芯片的生态支持。普华基础软件与加特兰将共同打造“中国芯”+“中国软”解决方案,共同探索新的市场机会,通过客户资源整合、共享,促进双方的业务发展。