
毫米波雷达室内人员检测新突破

AiP助力实现新突破
2019年加特兰推出了基于60GHz/77GHz毫米波雷达芯片的室内人员检测解决方案,用于室内人员的精准定位和稳定跟踪。同时,结合加特兰针对生命体征探测功能的方案,可实现对室内人员有无及生命体征状态的判断。
在此基础上,加特兰基于AiP毫米波雷达芯片的新方案又率先实现了3D目标跟踪、房间面积测量等功能,为智能家居、消费电子、养老等市场提供了新方向和选择。
3D目标跟踪
基于加特兰AiP的毫米波雷达具备很高的距离分辨率,可以同时测量目标的方位角和俯仰角,从而获得丰富的被测量目标的点云信息。利用所获得的点云信息,可以得到目标在三维空间(横向、纵向和高度)的分布状态,根据目标在三个维度分布的相互关系,以及目标的高度变化和时间的关系等方法判断出目标的姿态(如站、坐、躺和摔倒),实现区分大人与小孩、人与宠物的需求。

毫米波雷达的3D目标跟踪功能和生命体征探测功能相结合,可让人们的生活更加智能和安全。例如,通过对人体姿态和位置的判别,调节空调的出风量和方向;检测到跌倒、心跳呼吸异常时,及时发出通知;对呼吸频率的监测可判断是否处于睡眠状态,从而调节灯光强弱;小孩、宠物被遗忘在车里或者家里时,可及时发出预警……毫米波雷达点云成像的方式可避免隐私泄露,将更加适用于家庭、养老等私密空间的使用。

房屋面积测量
加特兰根据AiP毫米波雷达具有距离高分辨率这一特性,结合波达角估计算法、恒虚警率检测及相应的边界搜索方法,最终得到了一种实用鲁棒的房间面积测量方法。
通过对房屋面积的准确判断,可以为智能家居的合理化使用提供重要的依据,例如,通过对房间面积的测量,空调可以更好地控制制冷量,提高运行效率;电视、音响等家电可根据房屋面积以及人员有无调节音量大小……
基于AiP毫米波雷达的室内人员检测效果演示
让毫米波服务每个人
加特兰通过对毫米波雷达应用的不断探索,在室内环境中已实现对人员的稳定追踪、生命体征监测、大人、儿童及宠物的判别、人体姿态识别、房屋面积测量等功能,为智慧生活、安全生活提供保障。毫米波雷达将成为您生活中不可或缺的帮手。
加特兰,让毫米波服务每个人。
如何避免雷达间的相互干扰?
随着高级驾驶辅助系统(Advanced Driver Assistance Systems, ADAS)在近些年的飞速发展,毫米波雷达在新车的装配率日益增加。试想未来行驶在大街小巷的车辆都配备了毫米波雷达之后,雷达间的互相干扰将会成为一个越来越不容忽视的问题。

针对多雷达之间互相干扰的问题,加特兰的Alps雷达SoC给用户提供了有效的解决方案。在进一步展开前,让我们看一下常见的雷达间的信号干扰是怎样的:图1是一个典型的FMCW雷达信号被干扰的示例。假如雷达在工作时接收到周围其他雷达发出的chirp信号,且该干扰信号频率和当前雷达的工作频率相近,则干扰源将进入到雷达有效中频带宽(IF bandwidth)内。图2显示了干扰信号进入雷达有效中频带宽后情形,可见此时干扰信号对有效信号波形产生了很大的影响,容易导致有用目标信号无法被检出,或者产生虚假目标点。

图1

图2
为了解决上述的干扰问题,Alps芯片中的baseband加速器集成了多种抗干扰功能,包括frequency hopping模式、chirp shifting模式、phase scrambling模式以及interference mitigation功能。
01 Frequency hopping模式
该模式通过随机数生成器—异或链来随机改变frame中不同chirp的起始发射频率。
frequency hopping模式下的信号如下图3所示:
当异或链状态为0时,不改变chirp的起始频率,当异或链状态为1时改变chirp的起始频率;
当环境中存在同样扫频带宽的干扰信号时,通过这样的随机改变chirp的起始频率,其与干扰信号混频产生的中频信号将会在Alps的模拟带宽之外。
该中频信号将被滤波器过滤,故整个frame接收到的干扰信号能量将降低约一半(假设改变频率的chirp数量和不改变频率的chirp数量相同)。
而对于进入带内的干扰信号,由于其在chirp间出现的频率为随机数,其能量将会被分摊到整个2D-FFT的频谱内,因此不会聚集而产生假目标干扰。

图3
02 Chirp shifting模式
与frequency hopping模式类似,该模式通过随机数生成器—异或链来随机改变frame中不同chirp的起始时间点。
当异或链状态是1时,改变chirp的起始时间点,当状态是0 时,不改变chirp的起始时间点。
当环境中存在与雷达频率相近的干扰源时,通过随机改变chirp的起始时间点,其与干扰信号混频产生的中频信号也将会在Alps的模拟带宽之外,从而达到和frequency hopping模式类似的效果。

图4
03 Phase scrambling模式
该模式下,Alps通过随机数生成器随机改变frame中不同chirp的起始相位,如图5所示。当干扰信号出现时,由于相位被随机进行调制,其能量将会被分摊到整个2D-FFT的频谱内,因此不会聚集而产生假目标干扰。

图5
在以上三种模式下,Alps都需要对不同状态的chirp做相位补偿,从而减小chirp调制产生的相位误差。若补偿不当,则容易引起2D-FFT频谱中出现沿速度维的假目标。Alps独有的Baseband加速器将会自动对前两种抗干扰模式做补偿,而对于phase scrambling模式,用户可以在雷达标定环节对180度相位做更精准的补偿,从而获得三种模式中最优的效果,即不产生速度维spur(目前Alps SDK中已经集成了标定指令,非常易于用户在标定环节中调用)。
04 Interference mitigation模式
除了前面的三种抗干扰方式以外,Alps的baseband加速器还集成了一种干扰移除的算法。当雷达收集到时域信号波形后,会对信号的幅值变化率进行判断。如图6所示,若发现了信号中存在幅值变化率异常的采样点,则会将这些信号识别为干扰。在该情况下,Alps将会对这些信号做移除处理,从而降低2D-FFT的噪底。

图6
综上所述,对于多雷达的互相干扰问题,Alps提供了多种手段来供用户选择和使用,并对干扰的抑制、干扰的去除都产生了积极的作用。详细的算法信息及实现流程,请参考官网Alps Radar Baseband User Guide。
加特兰助力零跑C11智能驾驶系统
10月27日,加特兰受邀参加了零跑汽车携手21世纪经济报道举办的以“自主芯片•智驾未来”为主题的智能驾驶芯片行业发展论坛。期间,零跑汽车发布了中国首款具有完全自主知识产权的车规级AI智能驾驶芯片——凌芯01。该芯片将搭载在零跑汽车首款纯电高端SUV零跑C11上。加特兰作为零跑C11智能驾驶部分核心芯片合作伙伴出席了此次发布会。(以下图片来源:21世纪经济报道)

零跑汽车凌芯01发布会现场
作为CMOS工艺毫米波雷达芯片开发与设计的领导者,加特兰于去年发布了第二代车规级CMOS 77GHz毫米波雷达SoC Alps系列。此次零跑C11共搭载了五颗Alps系列产品,用于前雷达和角雷达。Alps的高性能、易使用以及低能耗等特性完美地契合了零跑高性能电动汽车对雷达传感器的需求,加速了产品的开发以及减少了时间和成本的投入,帮助客户快速实现产品化。

加特兰助力零跑C11智能驾驶系统
发布会当天,加特兰微电子COO吕昱昭在以“破界突围·中国自主芯片的机会和方向”为主题的圆桌论坛环节表示:“过去十几年里,半导体并购更多的是规模扩大,即横向整合更多。但实际上未来纵向的扩展和联合的价值会更加凸现,汽车产业更是如此,要有更大突破,一定要在垂直方向上形成合力,我们很高兴能与零跑合作,让智能驾驶变得更从容。”

加特兰COO吕昱昭受邀出席发布会
Dr Chen Jiashu Awarded Influential Figure 2020
On Oct. 28, 2020, awarding ceremony of Gasgoo Awards 2020 organized by Gasgoo.com was held in Shanghai. With expert review and millions of votes in 90 days, the Awards including Influential Figure 2020 had finally come to a completion.
To award his dedication to R&D, branding and quality, and outstanding contribution to the automotive industry and society at large, Dr Chen Jiashu, CEO of Calterah Semiconductor, was honored with Influential Figure 2020 of Gasgoo Awards.

Dr Chen earned his PhD degree in Electric Engineering from University of California, Berkeley. As a PhD candidate, Mr Chen worked in Berkeley Wireless Research Center and did some leading research in CMOS RF and mmWave integrated circuits, contributing significantly to the design theory of mmWave circuits, architecture of phased-array transceivers, and power amplifier design.
In 2014, Dr Chen came back to China and established Calterah Semiconductor. Under his leadership, Calterah in 2017 mass-produced world’s first CMOS 77/79-GHz mmWave RF front-end radar-on-chip for automotive use, and soon took the lead to break into the automotive original market. In 2019, Calterah rolled out radar SoC with integrated baseband, bringing revolutionary progress to mmWave radar sensor development.
“Our mission is to become the world’s best in our segmented area. We hope our mmWave radar technology can make the life of the whole society and even mankind easier. By using advanced CMOS technology to revolutionize mmWave radar sensors, we make them affordable to ordinary people and accessible to every vehicle. Surely, widespread use of the sensors and intelligent driving systems will make us safer on the roads.” said Dr Chen.
加特兰CEO陈嘉澍博士荣获“2020最具影响力人物”
2020年10月28日,由盖世汽车主办的金辑奖颁奖典礼在上海•瑞立酒店盛大开幕。整个金辑奖历时90天,经过专家评审和数百万网络投票,评选出了“2020最具影响力人物”等奖项。
凭借着对公司研发、品牌、质量等方面的投入和重视,以及对行业、社会的贡献,加特兰微电子CEO陈嘉澍博士荣获本届金辑奖“2020最具影响力人物”。
陈嘉澍博士毕业于美国伯克利加州大学电气工程博士学位。读博期间,陈嘉澍于业界享有盛名的伯克利无线研究中心从事CMOS射频与毫米波集成电路的前沿研究,并在毫米波电路设计理论、相控阵收发机架构、功率放大器设计等方面做出大量贡献。
2014年,陈嘉澍博士回国后成立了加特兰微电子。在他的带领下,公司于2017年成功量产了全球首个汽车级CMOS工艺77/79GHz毫米波雷达射频前端芯片,率先实现了在汽车前装市场的突破。2019年,加特兰又率先推出了集成雷达基带处理的SoC芯片,为毫米波雷达传感器的开发实现带来了全新的变革。
“我们公司的使命就是成为这个领域全球最优秀的企业。我们希望我们的毫米波雷达技术能给整个社会、整个人类的生活带来便捷。通过先进的CMOS工艺给毫米波雷达传感器带来技术的革新,使平常老百姓都能够使用起来,走入每一辆车中。这一类传感器以及智能驾驶系统的普及,我们的出行会变得更加安全。”陈嘉澍博士说道。
携手同行,战胜疫情
抗击疫情,共度时艰。疫情发生以来,加特兰一直心系前线医护人员,并积极采取行动,通过多方途径采购防疫物资。近日,由加特兰捐赠的护目镜已顺利送到武汉指定医院。

CEO陈嘉澍博士表示,面对疫情不要掉以轻心,也不要草木皆兵。我们团结一致、互帮互助,一定能够战胜病毒。
当前疫情仍在持续,自公司有序复工以来,为了保障员工安全,采取早上前台测量体温无异常方可进入办公区;统一订购午餐,减少不必要的外出;购买口罩、消毒液、消毒灯等物资,每晚对办公区进行消毒;多采取线上会议,避免员工聚集等多项措施,从小事做起,共同抗击疫情。
与此同时,加特兰也将继续从各种渠道采购防疫物资,尽快将更多物资送往前线,助力一线人员共同度过难关!
道闸雷达一体化解决方案
随着汽车数量的不断增加,对区域出入口车辆管理系统的要求也越来越高。对于车辆及人员出入口管理的传感器目前主要使用的是摄像头、红外线对射以及地磁线圈。
摄像头应用最为广泛,在光照较好的环境中使用效果稳定。但是在夜晚、雾霾等复杂天气情况下性能会受到影响,很难做到全天候工作,在道闸应用中主要做触发功能来用。
红外线对射传感器是由一对收发装置安装在道闸两侧组成,安装时需要精确对齐,布局和走线都比较复杂。最主要问题是容易被物体(小动物、树枝等)遮挡而引起误触发。
另外一种应用广泛的传感器是地磁线圈。其本质是多匝线圈,形成磁场,根据电磁原理感应车辆进入。此种传感器安装时需要破坏路面,把地磁线圈埋在地下,对维护会造成不便。同时,地磁线圈对于大型车辆检测不够稳定,不能区分人和车,使用寿命短。
而作为全天候工作的毫米波雷达,因为具有安装简单、能够区分人员和车辆、低误触发率、不受天气及环境影响、使用寿命长等特点越来越受到用户的喜爱。
加特兰微电子基于60GHz/77GHz毫米波雷达SoC AiP(Antenna in Package)研发的道闸雷达硬件设计简单,为客户缩短了开发周期、降低了成本。
从图1的系统架构图中我们可以看出,除了主控芯片以外只需要电源芯片、FLASH及晶振即可完成整个系统功能。系统器件少,且不需要高频板材,在减小尺寸的同时降低了成本。
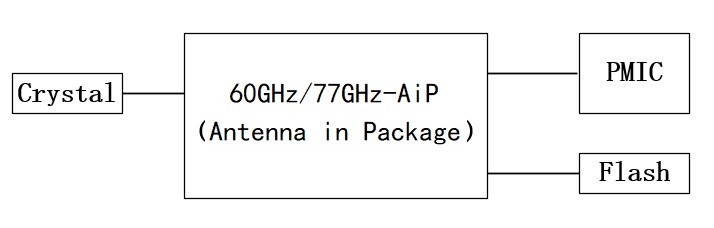
图1 加特兰道闸雷达应用系统架构图
AiP大小为12mm*12mm,有四个发射通道、四个接收通道,支持最大4×4 MIMO,具备解俯仰角和水平角的能力,连续扫频带宽最高支持5GHz,目前为业内最宽。理论距离分辨率可以到0.04米,速度分辨率可以到0.04米/秒。
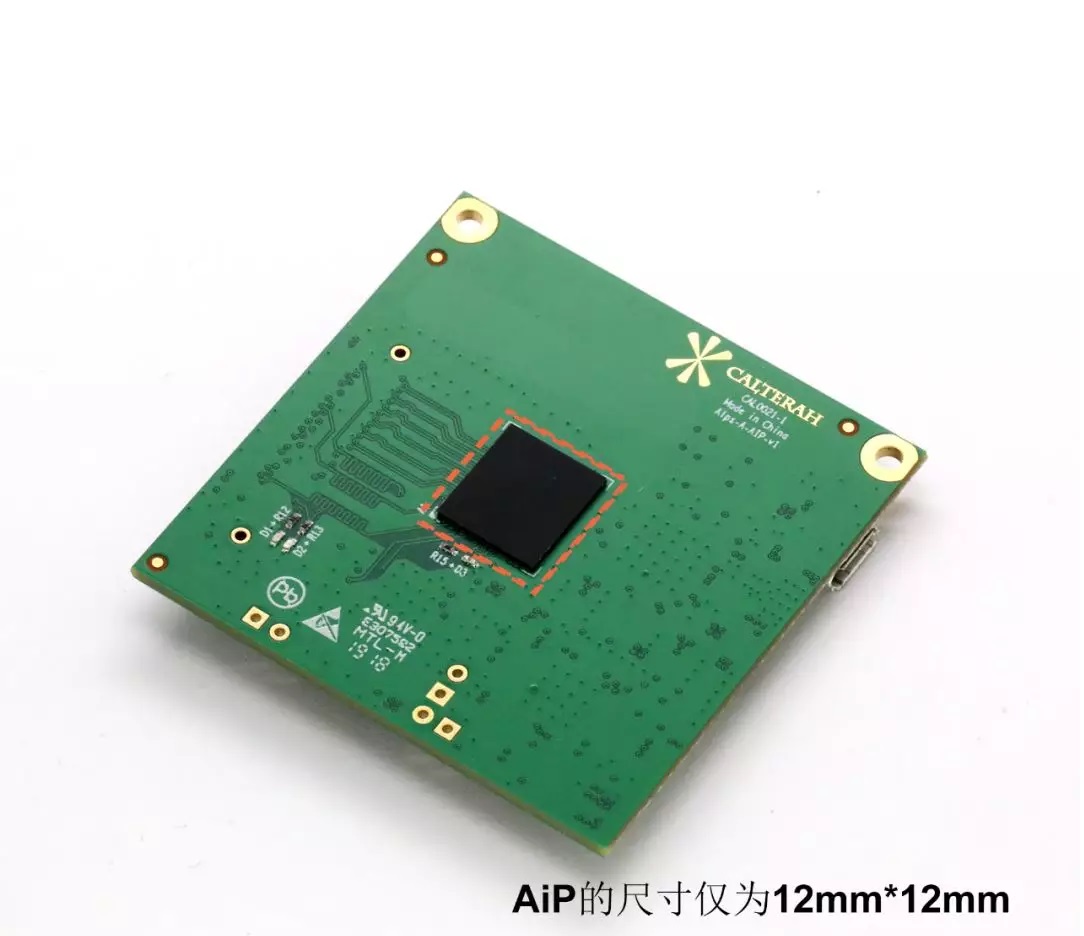
图2 加特兰77GHz SoC AiP雷达开发平台
众所周知,60GHz/77GHz毫米波雷达在应用时,不仅仅对天线设计合理性有很高的要求,更因为天线对于生产工艺要求极高,所以核心技术至今仍为少数企业所掌握,影响了毫米波雷达的推广。
加特兰微电子AiP系列由于把设计及生产难度极高的天线集成到了芯片封装里面,极大降低了雷达开发的难度和成本,能够更好应用于道闸雷达。

图3 加特兰道闸雷达应用系统安装图,客户只需要在应用场景下连接电脑即可进行现场调试
使用加特兰道闸雷达应用系统,客户道闸雷达的实现变得很简单:
首先,使用加特兰雷达开发平台(RDP)进行安装和调试。
其次,参考加特兰道闸雷达建议配置参数,并借助加特兰软件开发工具进行寄存器和软件相关设置,并在此基础上进一步微调以达到理想效果。
另外,加特兰提供了两种数据输出,一种是输出卡曼滤波器之前原始数据,客户可以基于此来开发自己的聚类和跟踪,另一种是加特兰提供的目标数据,客户也可以直接使用。
图4 使用加特兰道闸雷达系统识别车辆
图5 使用加特兰道闸雷达系统可避免对行人的误判
未来加特兰道闸雷达系统会在现有用功能应用基础上增加逻辑判断功能,并增加与道闸互联的功能,增加多场景的适应性,进一步提高道闸雷达检测精准度,给客户提供更简易方便的参考设计平台。
Alps — 77GHz mmWave Radar SoC with Functional Safety Design Inside
The Alps family includes 40 safety mechanisms to monitor the single point faults of the whole chip and 9 safety mechanisms of “safety mechanisms” to monitor the safety mechanisms’ working state. An independent EMU (Error Management Unit) is used to handle functional safety related interrupts and control the state of the device.
Calterah is building up the IC development process following the ISO 26262 standard, and cooperating with “TüV Rheinland” for ASIL B certification for Alps and for development process certification.

IWPC Year 2019 in Germany
Dr. Zhu Yan with Calterah Addressed IWPC Year 2019 in Germany.
Calterah Semiconductor, as a leading mmWave radar sensor chip provider, was invited to the International Wireless Industry Consortium (IWPC) Year 2019, held in Germany. At the workshop, Dr. Zhu Yan with Calterah Semiconductor, delivered a speech entitled “Cascade Radar System–A System-on-Chip Approach”, in which he expounded his insights into “Cascade at SoC Level”.
Calterah Semiconductor has made “Cascade at SoC Level” a reality in its Alps family of radar sensor chips, newly released in this March, through major digital algorithm breakthroughs. The product launch video with English subtitles is coming soon. Stay tuned.

功能安全对于安全驾驶的重要性
交通事故将成为全球第七大死因
全球每年因为汽车事故导致的死亡率大概是十万分之十七,这是2015年世界卫生组织发表的数据。同时,世界卫生组织表示,如果不持续采取行动,预计到2030年,道路交通事故将成为全球第七大死因。

根据数据显示,造成交通事故的原因中,人为因素是主要原因之一,因此很多人认为,自动驾驶诞生的意义不仅是为了解放双手,更是为了拯救生命。
当自动驾驶或者高级辅助驾驶实现之后,汽车将主要通过电子控制系统来完成行驶。这样做虽然排除了人为因素,但是也加深了对设备安全性的依赖。随着技术的进步,汽车中核心部件逐渐电子化,其核心控制单元往往由芯片实现,所以,导致汽车失效的原因也从以前的机械疲劳逐步向芯片的疲劳失效转变。
对于芯片的疲劳失效,我们可以通过一定的等效实验来验证其长期使用的可靠性。但是,这个验证结果往往是通过一定的理论公式预期出来的使用寿命。同时,该等效关系的可信任程度与实验的方案、实验条件,甚至是实验人员的素质都有非常大的关系。等效试验可以证明一个芯片的可使用时间和失效率能够低于一定值,但并不能降低失效率。
芯片需要“报警功能”
到这里,我们就要提到“功能安全”。当安全系统满足以下条件时就认为是功能安全的,即当任一随机故障、系统故障或共因失效都不会导致安全系统的故障,从而引起人员的伤害或死亡、环境的破坏、设备财产的损失,也就是装置或控制系统的安全功能无论在正常情况或者有故障存在的情况下都应该保证正确实施。
为了达到以上目的,加特兰在芯片设计中加入了大量的实时检测机制不断的监控芯片的状态,如果检测机制发现芯片故障,这个检测机制会将芯片进入到安全状态并将错误上报。

根据芯片内部电路的检测能力以及一些配套要求的不同,ISO26262将芯片分为ASIL A、B、C、D 四个等级。四个等级分别对芯片失效的检测率有不同的要求,例如芯片满足了ASIL B等级的要求后,就意味着其能检测出90%的自身故障。
如何满足“功能安全”
要满足功能安全,需要从两方面入手,一是建立满足功能安全的标准化流程,二是满足功能安全的产品设计。
建立标准化的流程会保证产品开发过程不发生系统性的失效,确保所有需求都有被设计完成,同时具有可追溯性;保证所有的设计都被验证和测试到,同时验证和测试也有足够的独立性;确保分析到位并且得到了正确的执行等。加特兰投入了大量的时间进行研究和规划,并与TÜV Rheinland的合作,建立起了完整的功能安全开发流程。
芯片设计本身是一个非常复杂的过程,包括了各种电路设计,电路验证,语言仿真,语言转换等内容,根据ISO26262整理的常规设计流程就有一百多个步骤。加特兰对每一项都建立了追踪机制。在常规的设计流程之外,还有大量专门针对功能安全需要增加的分析,包括最终会提供给客户的FMEDA,Safety manual等部分。
加特兰新一代ALPS系列,针对整个芯片的数十万个模拟晶体管,超过1800万个数字晶体管,以及1.5亿个存储晶体管进行了统计分析。根据功能,将其拆分为200多个模块,对所有的模块的1000多种失效模式进行了分析,并且,设计了对应的40多种安全机制,用于及时的监控芯片的工作状态。对于40多种安全机制,加特兰又设计了9种安全机制的安全机制来监控其工作状态。关于产品的功能安全的设计,加特兰也与TÜV Rheinland合作,认证其符合ISO26262的ASIL B的要求。
